Cleaning Robot Vision System
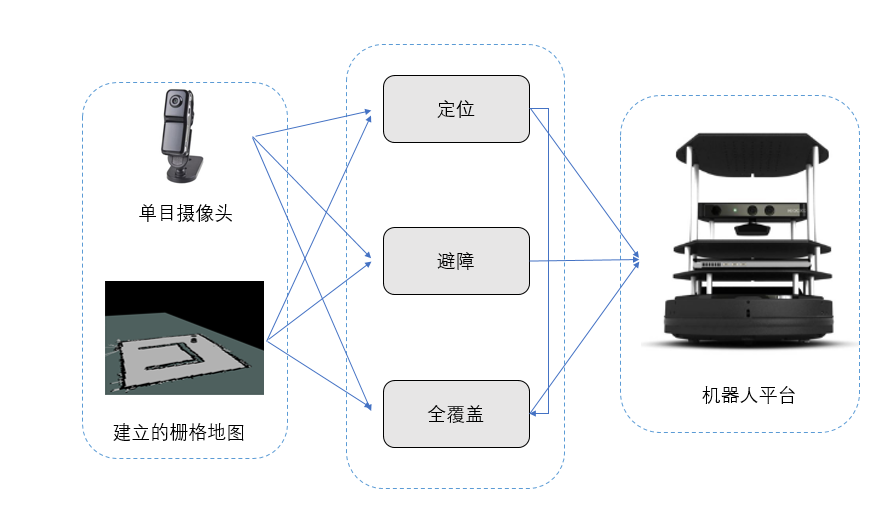
Relying on the key industrial research projects in Guangdong Province, the members of the research team completed the design and implementation of the sweeping robot system for the key technologies of map construction and autonomous navigation in the unstructured environment of the sweeping robot. Including (1) the method of feature detection and matching technology based on monocular camera. (2) Feature matching and error elimination based on robust feature points. (3) Ground plane detection and obstacle detection based on monocular vision. (4) Information fusion technology based on inertial sensors and visual sensors. (5) Full coverage path planning algorithm based on biologically motivated neural network. Low-cost vision-based cleaning robot positioning and navigation solutions have important research significance in both academia and industry.