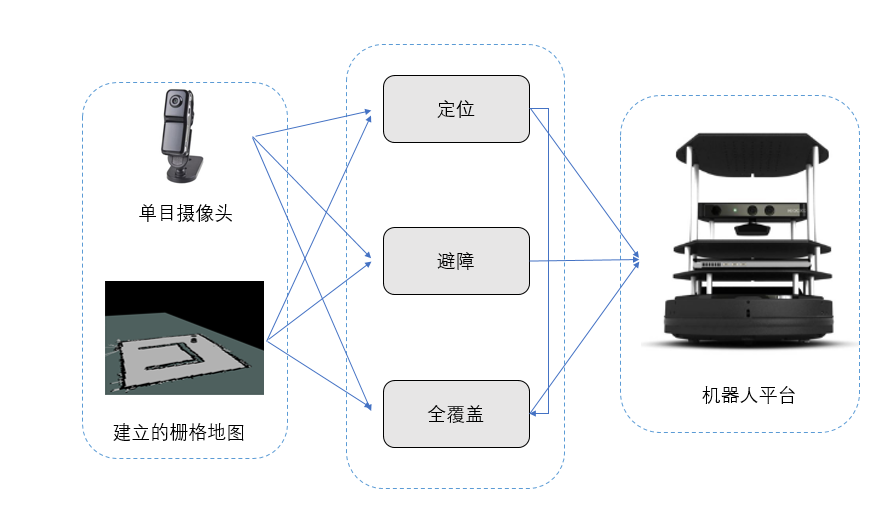
依托广东省重大产业攻关项目,课题组成员针对扫地机器人的非结构化环境下地图构建及自主导航关键技术,完成了扫地机器人系统的设计与实现。包括(1)基于单目摄像头的特征检测与匹配技术的方法。(2) 基于鲁棒特征点的特征匹配与错误剔除。(3)基于单目视觉的地平面检测与障碍物检测。(4)基于惯性传感器与视觉传感器的信息融合技术。(5)基于生物激励神经网络的全覆盖路径规划算法。低成本视觉的清洁机器人定位与导航方案,无论是在学术界还是在产业界都有着重要的研究意义。